
ZIVID彩色相机手眼标定介绍
今天我们来看看如何用zivid彩色相机进行手眼标定——
手眼标定用于将相机(“眼睛”)看到的内容与机器人手臂(“手”)移动的位置相关联。
眼在手上:机器人手眼系统的手眼标定是为了确定安装在机器人上的相机与机器人末端执行器坐标系间的相对位置和方向。通常我们需要将标定物静置在机器人手眼系统的工作空间内,然后控制机器人以不同位姿(位子和姿态)采集一组标定物图像。
眼在手外:机器人手眼系统的手眼标定是为了确定安装在机器人外的相机与机器人坐标系间的相对位置和方向。通常,通过将已知形状或图案的标定物放置在机器人的抓手中来完成的。 然后在一组不同的位置和方向上拍摄一系列图像。
1.系统配置
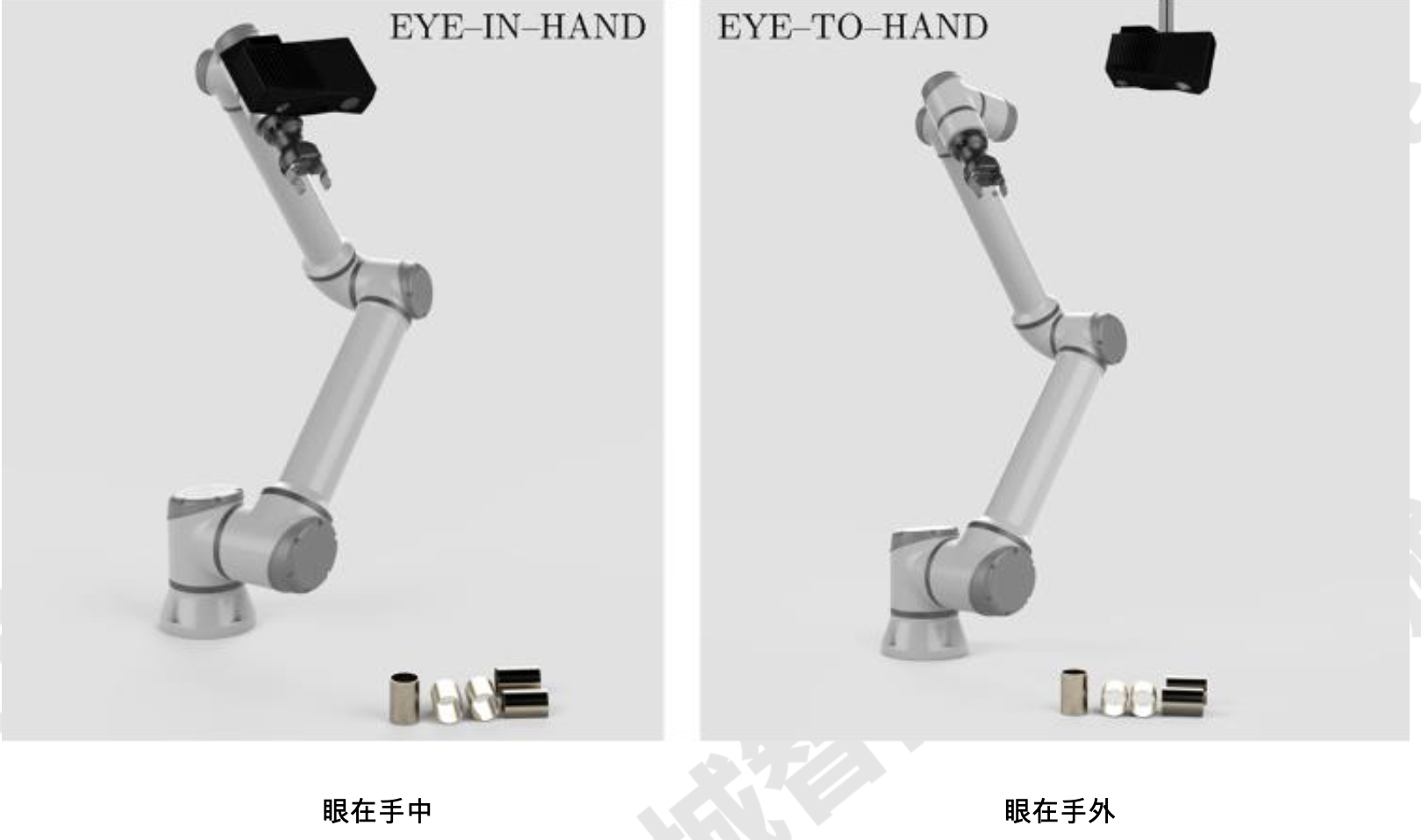
在一个机器人手眼系统中,相机可以安装在机器人上,也可以安装在机器人外,对于前者,我们通常称其为“眼在手中(eye-in-hand)”,对于后者我们通常称其为“眼在手外(eye-to-hand)”。对于这两种不同的配置,有两种不同的标定流程。
眼在手外(eye-to-hand)
具有这种配置的系统在其工作空间内安装有一个相机(固定在机械手外),用于拍摄其工作空间内的被摄物。
这种配置的优点是相机距离机器人的工作区域相对较远,因此机器人不会与其发生碰撞。另一个好处是可以在机器人移出相机视野的时候触发相机采集图像,这意味着更短的工作周期。
缺点1
由于机器人在工作过程可能会遮挡相机视野,从而需要做好系统流程规划,需要编写更复杂的机器人控制程序以控制机器人在其移出相机视野时向相机发送采集图像的触发信号。
此外,这种配置也不太灵活,因为相机是安装在一个固定位置,仅能拍摄固定视野范围内的物体,无法像“眼在手中”配置一样根据应用需求通过移动机器人灵活调节相机的拍摄位置,例如,当我们的应用需要更高精度时我们可以控制机器人移动到离被摄物较近的位置拍摄,这样利用相机近视野拍摄图像每个像素的空间分辨率更小,从而可以提高系统的精度。静态的并且具有恒定的视点。所以FOV无法更改。
眼在手中(eye-in-hand)
具有这种配置的系统相机通常将安装在机器人的末端执行器上或附近。例如,在测量类应用中我们通常将相机安装在机器人法兰盘上,而在定位拾取类应用中我们通常将相机和夹爪组成一个模块安装在法兰盘上。
这种配置的优点是可以根据应用需要改变相机的拍摄位置或方向,例如,我们可以控制机器人移动到不同的位置拍到更大或更小的FOV。也可以从多个方向拍摄被摄物,获得被摄物更完整的点云数据。还可以通过改变拍摄方向缓解镜面类被摄物表面容易过曝的问题。
缺点1
相机安装在机器人上增加了运动过程中碰撞相机的风险,需要仔细规划机器人的运动路径。
缺点2
在拾取类应用中当机器人拾取物体后在向放置点的运动的过程中相机无法拍摄图像,相比于“眼在手中”配置工作周期更长。
缺点3
在拾取类应用中,由于相机需要安装在机器人上会占用机器人的有效载荷。
